Claymore
Well-known member
There has been some discussion about 'coasting' in this thread;
http://www.myoutlanderphev.com/forum/viewtopic.php?f=9&t=1976 and elsewhere (can't find the posts again) but searches haven't produced any further info for me, maybe I should just wait a few more days and read the manual.
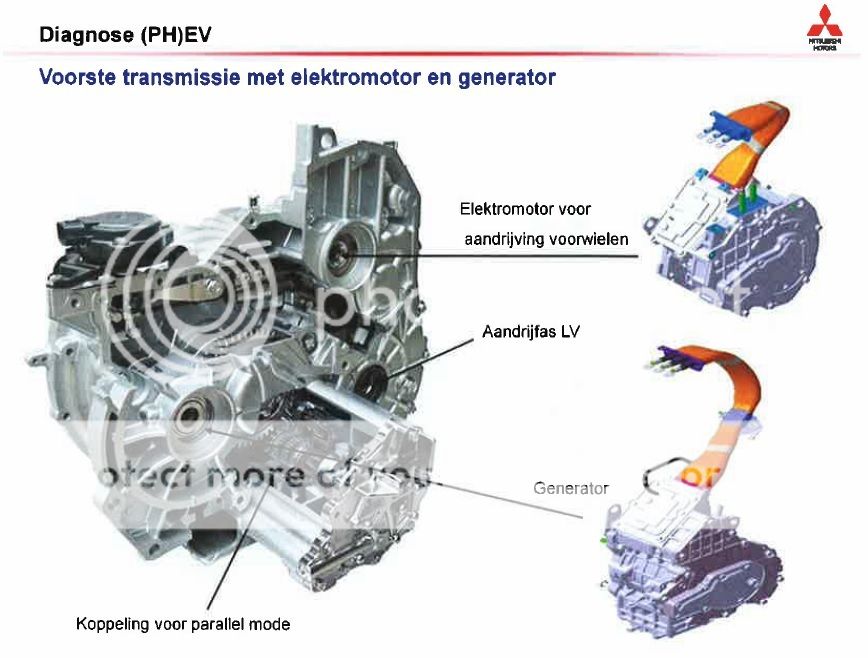
I seem to remember someone (Anko is prime suspect :idea: ) saying that even when 'coasting' in B0 some energy will still flow from the batteries to negate the drag from the electric motors, and whilst lying in bed thinking about my long coasts in neutral with my Skoda Superb ( :roll: ) with no drag from the engine (which was still idling nevertheless) I couldn't rationalise how you could actually be 'coasting' if the E motors were still connected and being turned by the wheels so the question is;
Are the E motors always mechanically connected to the wheels either directly or via the CVT (another question)? or can they be physically disconnected by (say) moving the CVT selector to 'Neutral' instead of leaving it in 'gear' at setting B0?
I hope this question does not set a new low standard of my ignorance of the car.
Jim B
http://www.myoutlanderphev.com/forum/viewtopic.php?f=9&t=1976 and elsewhere (can't find the posts again) but searches haven't produced any further info for me, maybe I should just wait a few more days and read the manual.
I seem to remember someone (Anko is prime suspect :idea: ) saying that even when 'coasting' in B0 some energy will still flow from the batteries to negate the drag from the electric motors, and whilst lying in bed thinking about my long coasts in neutral with my Skoda Superb ( :roll: ) with no drag from the engine (which was still idling nevertheless) I couldn't rationalise how you could actually be 'coasting' if the E motors were still connected and being turned by the wheels so the question is;
Are the E motors always mechanically connected to the wheels either directly or via the CVT (another question)? or can they be physically disconnected by (say) moving the CVT selector to 'Neutral' instead of leaving it in 'gear' at setting B0?
I hope this question does not set a new low standard of my ignorance of the car.
Jim B
")